Advantages of soldering robot
2021-09-23 09:35:30


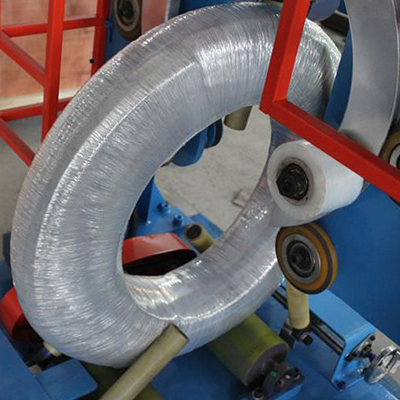
Because the solderig robot machine is designed to work in the environment of quasi plane and narrow space, in order to ensure that the robot can track the welding seam actively according to the error information of arc sensor, the robot should be compact, mobile sensitive and stable. In this paper, a small mobile robot welding machine is developed for the narrow space characteristics, According to the movement characteristics of each structure of the robot, the robot mechanism is divided into three parts: wheel mobile channel, torch conditioning mechanism and arc sensor by using modular programming method. In addition, robot manipulator and motor driver are integrated into robot mobile channel, which makes it smaller in size because of its large inertia and slow response, mainly coarse tracking of weld seam. Torch adjusting mechanism is responsible for accurate tracking of weld seam, and real-time identification of welding error of arc sensor. In order to reduce the influence of dust on moving parts under the bad welding environment, the fully closed structure is selected to improve the reliability of the system.
The requirements of soldering robot are not very high. Because it only requires point position control, as for the moving track between the point and the point, there is no strict requirement for the welding tongs, which is the reason that the robot can only be used for soldering at the earliest. The robot should not only have the ability of satisfying the load, but also the speed of the point to point shift should be fast, the movement should be stable and the positioning should be accurate, so as to reduce the shift time and improve the efficiency of the operation.
The load of the soldering robot depends on the welding clamp. For welding tongs separated from transformers, 30-45kg load robot can meet the requirements. However, on the one hand, because of the long secondary cable line and large power loss, the welding clamp is not conducive to robot welding inside the workpiece; On the other hand, the cable is swinging with the robot, and the cable damage is faster. Therefore, at present, more and more integrated welding tongs are used. The welding tongs and transformers are about 70kg in mass. Considering that the robot must have the ability to meet the load, it can send the welding tongs to the space position with a large acceleration for welding. Generally, the heavy-duty robot with a load of 100-150kg is generally selected. In order to meet the requirements of the quick shift of welding tongs in the process of connecting spot welding. The new heavy robot adds the function of completing 50mm displacement within 0.3s. This requires higher requirements for the function of motor, the speed and algorithm of microcomputer.
Perkhidmatan dalam talian